We Wins Best Paper Award at ICRA 2025 for Innovative Soft Growing Robot Technology
Soft Growing Robots team from our laboratory, comprised of Ph.D. candidates Dongoh Seo and Nam Gyun Kim, along with Professor Jee-Hwan Ryu, was honored with the 2024 Best Paper Award at the prestigious 2025 IEEE International Conference on Robotics and Automation (ICRA) in Atlanta, USA. The award recognizes their outstanding paper published in Robotics and Automation Letters (RA-L), a premier robotics journal under the Institute of Electrical and Electronics Engineers (IEEE).
This highly competitive award is presented to only the top five papers out of approximately 1,500 published in RA-L in 2024, underscoring its significant international prestige and rigorous selection process.
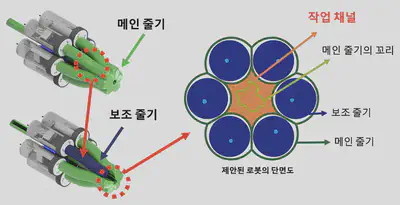
The award-winning paper, led by Professor Ryu, proposes a groundbreaking technique for securing new working channels within soft material-based “Soft Growing Robots.” These robots move and perform tasks by growing in a manner similar to plant roots. The new method significantly expands their practicality and application potential.
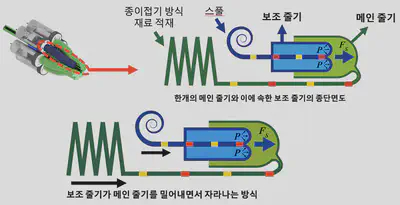
Traditional soft growing robots operate by inflating or deflating their bodies through internal pressure changes, which can lead to the internal channels becoming blocked. In contrast, the newly developed soft growing robot maintains its internal channels at ambient atmospheric pressure while still enabling its growing function. This innovative approach successfully secures an unobstructed internal pathway while preserving the robot’s inherent flexibility and softness.
This unique structure allows for the free delivery of various materials or tools through the robot’s internal channels, enabling versatile task execution by flexibly interchanging equipment based on the operational environment.
To validate the effectiveness of their technology, the research team developed a prototype and conducted extensive experiments. Specifically, they performed a slide plate experiment to confirm that materials and equipment could pass through the robot’s internal channel without obstruction, and a pipe pulling experiment to verify that long pipe-shaped tools could be retrieved through the internal channel.
The experimental results definitively demonstrated that the internal channels remained stable even while the robot was growing, providing crucial evidence for the technology’s practicality and scalability.
“This award is incredibly meaningful as it signifies global recognition for South Korea’s robotic engineering capabilities and academic achievements,” said Professor Jee-Hwan Ryu. “Furthermore, the technical advancements that significantly expand the practical applications of soft growing robots are highly significant. This achievement was made possible through the dedication and collaborative efforts of our research team, and we will continue to contribute to the advancement of robotic technology through innovative research.”
The study was co-authored by Ph.D. candidate Dongoh Seo from the Department of Civil and Environmental Engineering and Ph.D. candidate Nam Gyun Kim from the Robotics Interdisciplinary Program. The paper was published in Robotics and Automation Letters on September 1, 2024.
(Paper Title: Inflatable-Structure-Based Working-Channel Securing Mechanism for Soft Growing Robots, DOI: 10.1109/LRA.2024.3426322)
This research was supported by both the Pioneer Research Center Program for Convergence Technologies and the Mid-Career Researcher Program of the National Research Foundation of Korea.
Euibin Shin