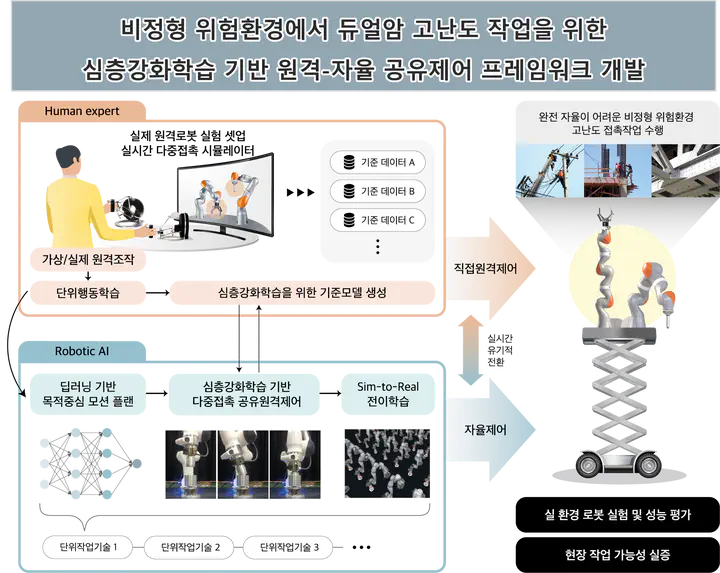
Development of a shared autonomy control framework based on deep reinforcement learning for a dexterous dual manipulation in unstructured environment
2020.04.01. - 2021.12.31.
1. Funding Agency
MOTIE
2. Motivation
Radiation shielded cells and high-altitude construction sites involve hazardous tasks that are difficult to automate and rely heavily on skilled workers. This study aims to develop remote robot systems that combine autonomous intelligence with human collaboration, enabling non-experts to perform complex tasks safely and efficiently in unstructured environments.
3. Objectives
The project develops a robotic system enabling intent-based shared control, real-time task planning, and goal-driven action prediction, with learning from operator behavior and validation through dual-arm multi-contact task experiments.
4. Results
- Position-Force-based Skill Learning through Teleoperation
- Shared Teleoperation Framework
5. Related Publications
- Virtual Inertia as an Energy Dissipation Element for Haptic Interfaces
- Development of the Skill Learning and Transferring System through Teleoperation
- The Development of Research on Interactive Virtual Fixture Generation
6. Contact
- Kwang-Hyun Lee
- Joong-Ku Lee