Haptics and Telerobotics

Over the past several decades, there has been a steady increase in the application of telerobotic systems such as for space and underwater exploration, mining, nuclear and toxic material handling, surgery, and even entertainment. Telerobotics technology allows us to deliver human-like manipulation skills to environments, inaccessible to or dangerous for humans, by combining human intelligence with robot precision, repeatability and power. Especially, haptics plays an essential role in kinesthetically coupling a telerobot with a human operator. In IRiS Lab, we are developing control methodologies and master devices towards the implementation of stable and transparent telerobotic systems for various application areas.
*Image courtesy of DLR.
Soft Actuator and Wearable device

Recently, there has been an increasing interest in exoskeletons. One of biggest challenges of exoskeletons is to maintain softness while providing high enough structural support to assist human motion. Furthermore, there is a need to develop wearable exoskeletons that are lightweight, powerful and agile. However, conventional exoskeletons are stiff and rigid as they consider human joints as mere single degree-of-freedom revolute joints. This constrains the wearer’s natural motion. Thus, there is a need to find a suitable actuator that is soft, and can provide high-actuation forces. In IRiS Lab, we are investigating the properties and application of a soft muscle-like actuator called the Twisted String Actuator (TSA). We use TSA’s high transmission efficiency and high power-to-weight ratio to create soft, yet powerful, wearable exoskeletons.
Autonomous Vehicle

Recently, autonomous vehicle technology has been receiving considerable attention with the increased interest in the 4th industrial revolution. An Autonomous vehicle is a vehicle that is capable of sensing its environment and moving safely with little or no human intervention. In order to develop an autonomous vehicle, various technologies are required, including vehicle state identification, surround mapping, sensor fusion, path planning, motion control. Ever since the start of our participation at the autonomous vehicle competitions organized by Hyundai Motors, IRiS Lab has been conducting autonomous vehicle research since 2010. Our research mainly focused on navigation, typically, localization, mapping, obstacle detection, and path planning. Our expertise, based on many years of experience in autonomous vehicle competitions, has enabled us to build a robust and practically available autonomous driving solution in real road environments.
Soft Growing Robot
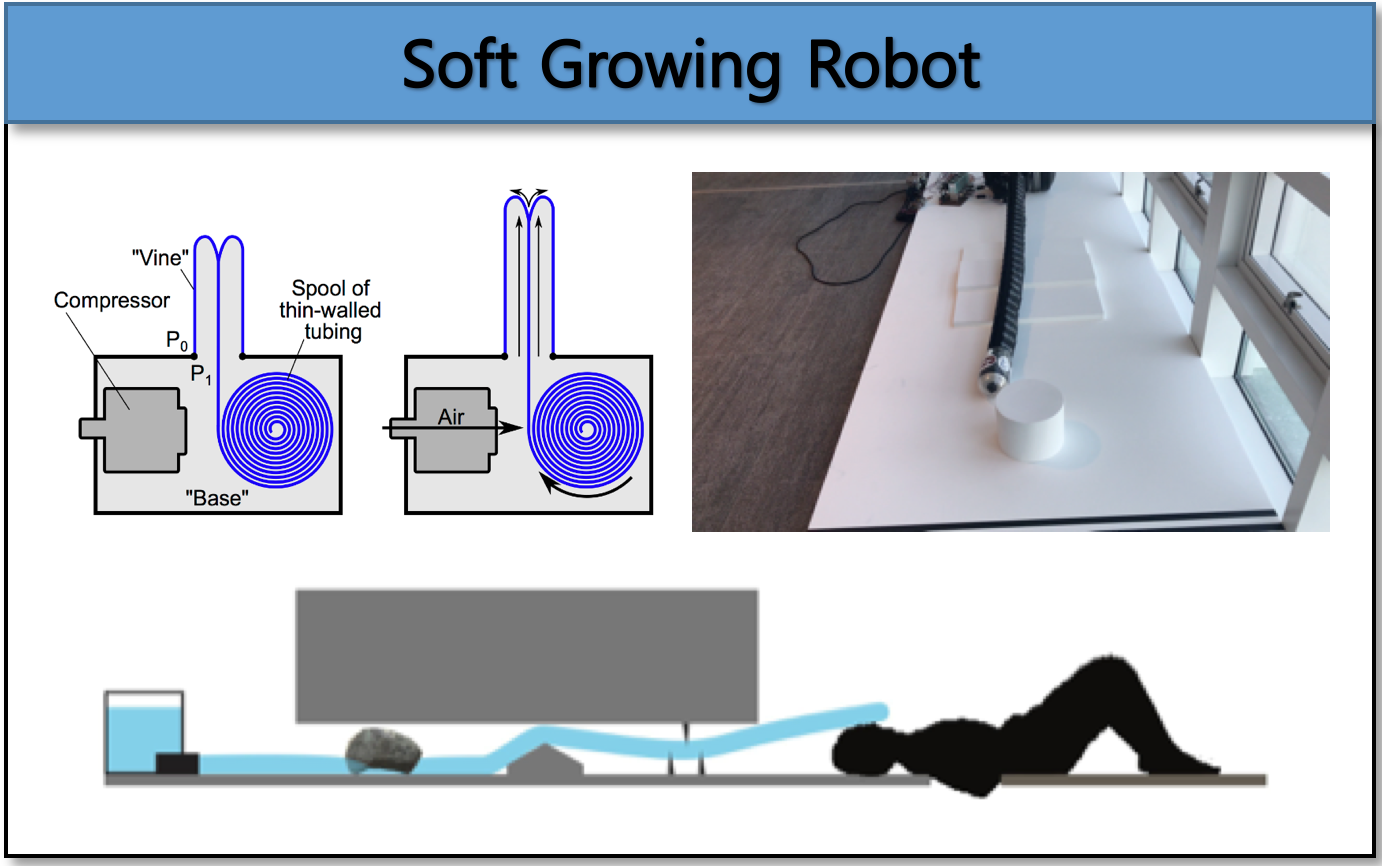
As the occurrence of natural and human-made disasters increases, the demand for disaster response robots to provide situational assessment and appropriate rescue actions rises rapidly. However, robots with classical locomotions, such as legged, tracked or wheeled, have been showing limitations in unstructured disaster environments. In IRiS lab, we study a new concept of soft growing robot inspired by the growth of plants. We developed a soft growing robot that can traverse extreme terrains, such as uneven, sticky, slippery, or steep, that are inaccessible for the classical robot locomotion. Besides, we are developing intuitive teleoperation and shared control interface for the effective deployment of the soft growing robot. We believe such a robot has a vast potential in exploration and rescue operations in disaster and hazardous environments, such as nuclear plants, underground utility tunnels, collapsed buildings, and buildings on fire.